
Only the female end of the servo extension cable is required. Cut the female connector from the cable along with about 2 inches of wire. Solder the power and signal wires to the feather butt and D13 pin respectively, and leave the ground wire unsoldered for a while.
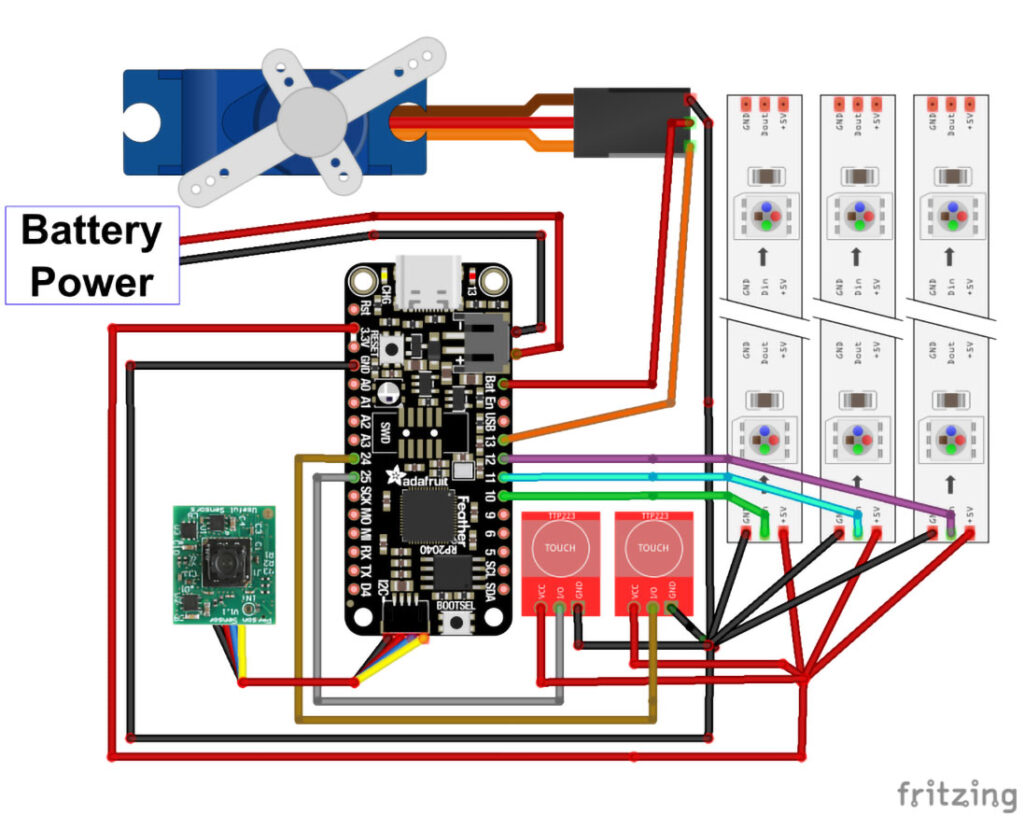
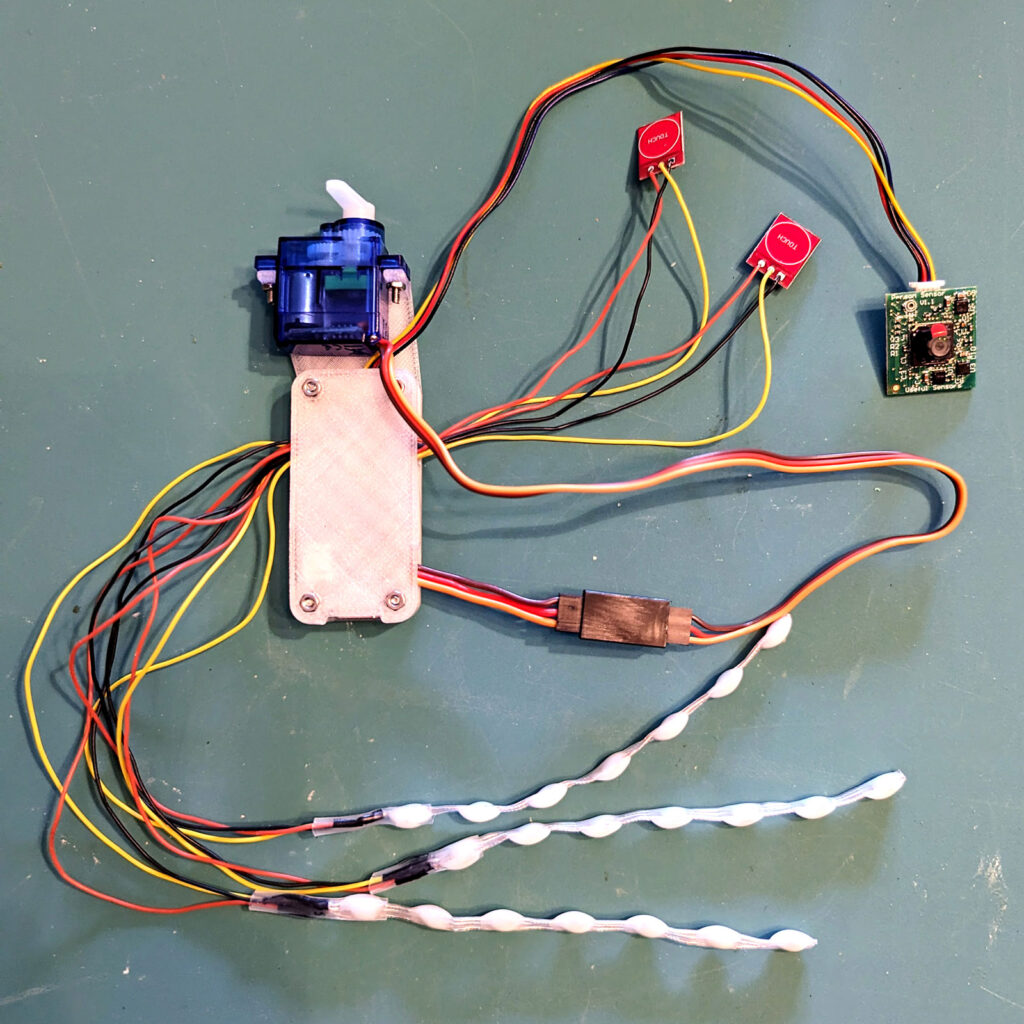
Figure S shows the wired connections between the Feather RP2040 and its peripherals. The Feather’s 3V and GND pins power three LED strings and two touch sensors.
To simplify connections, solder the peripheral power wires into two bundles, one for power and one for ground, and connect each bundle to one segment of solid core wire, which is connected to one feather pin. Masu. Cut two 1-inch lengths of 22 AWG solid core wire and strip approximately 1 cm of insulation from one end of each wire. Group the 30 AWG power wires from the capacitive touch sensor and LED string and strip approximately 1cm of insulation from the ends. Twist the peeled ends together. Do the same for the ground wires from the touch sensor and LED string, including the servo cable ground wire in this bundle. When twisting the wire, try to minimize tangles and knots. A bundle of stranded power wires is tinned and soldered to the stripped end of one of the solid core wires. Slide the shrink tube over the joint and heat it to shrink.
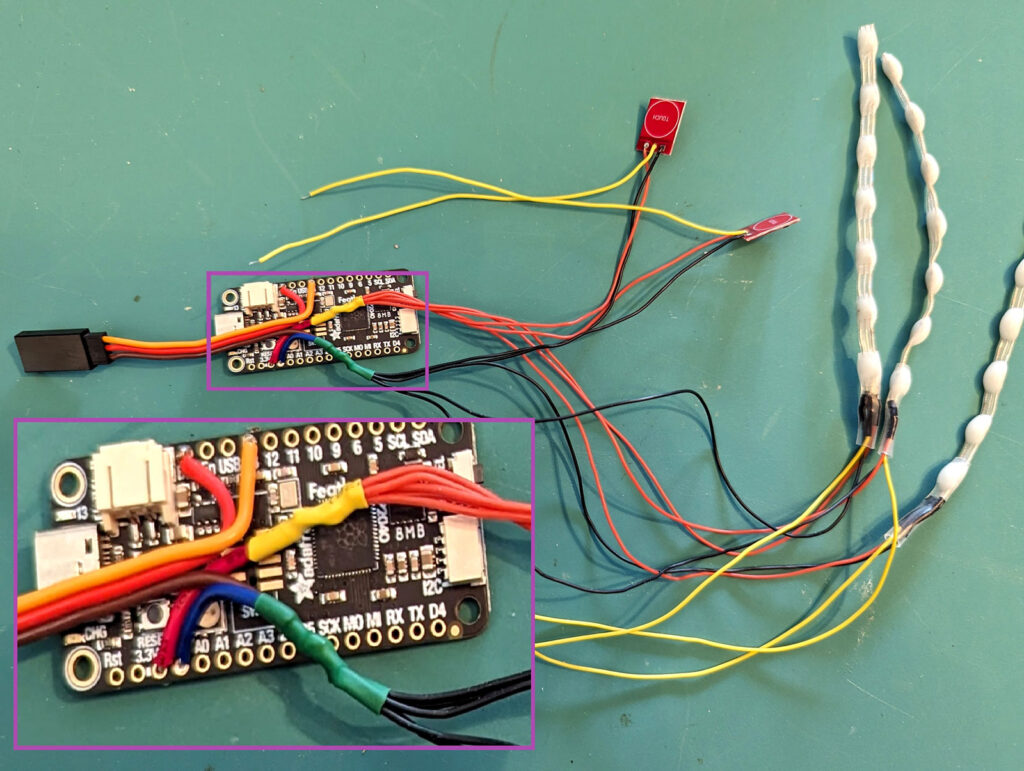
Repeat the same steps to connect the 30 AWG ground wire bundle and the servo cable ground wire to the remaining single-conductor wire. Finally, solder the free ends of the solid core wires to the 3V and GND pins of the Feather 2040. At this point, your wiring should look like Figure T.
Next, solder the free ends of the touch sensor signal wires to feather pins D24 and D25, and the LED string signal wires to feather pins D10, D11, and D12.
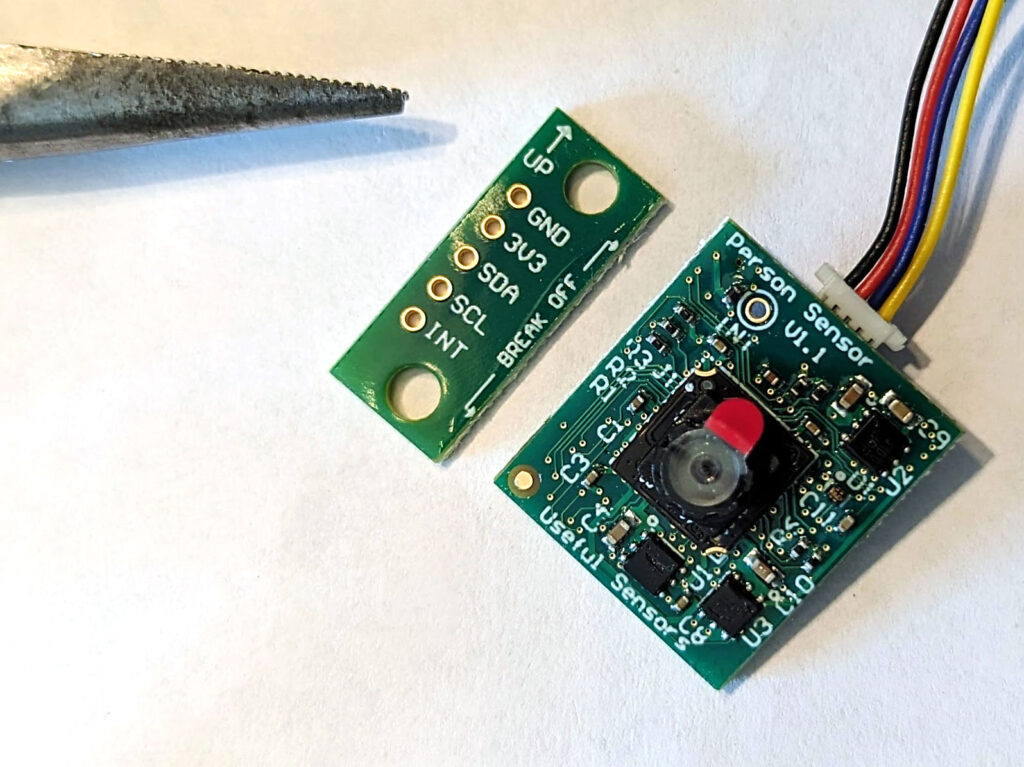
Remove the motion sensor and carefully use pliers to fold off the board at the part labeled “Disconnect” (Figure U). Connect the Stemma QT cable to the corresponding connectors on the Feather and motion sensor.
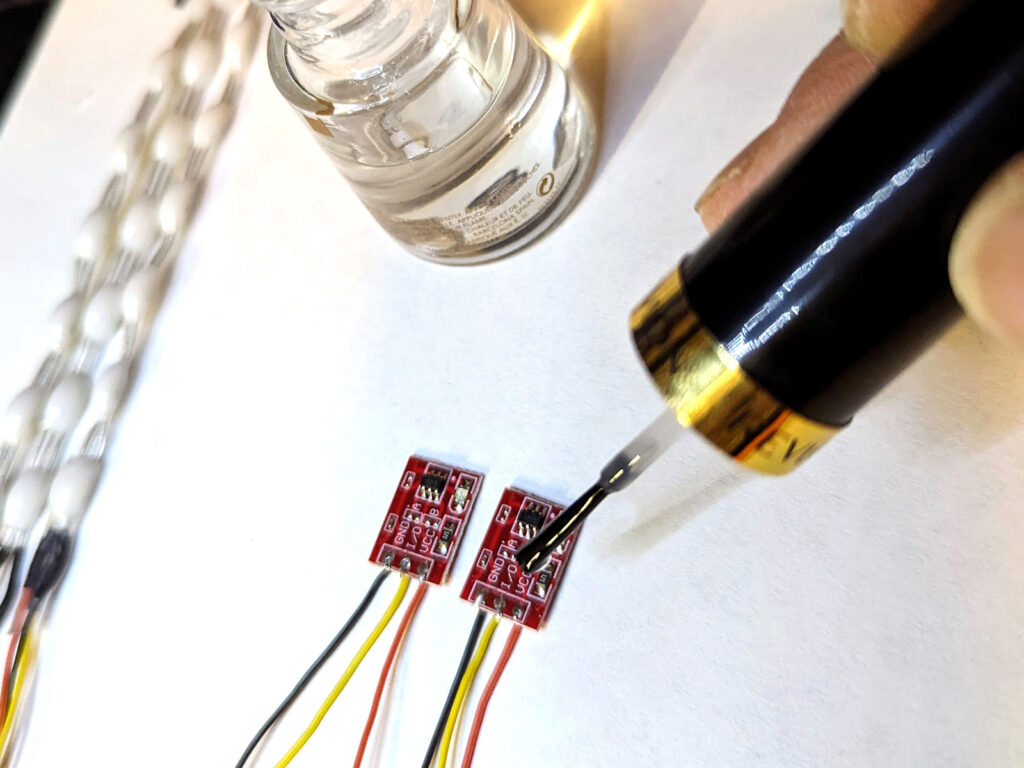
Coat the sensor board with clear nail polish as an additional layer of protection and insulation. Remove the touch sensor and apply a layer of polish to the entire surface containing the small SMT component (Figure V). Let the polish dry for 10 minutes. On the other side of the touch sensor, apply a little polish only to the solder pins, avoiding the part of the board that says “Touch”.
Similarly, apply clear polish to the surface mount electronics on both sides of the motion sensor, being careful not to paint the camera lens or the Stemma QT connector.
Once the polish is completely dry, insert the feather into the 3D printed housing with the perimeter wire extending through the side hole of the housing. Secure the lid to the base using four 12 mm M2 screws and nuts as shown in Figure W.
Attach the micro servo to the two vertical prongs of the 3D printed case using 8 mm M2 screws and nuts as shown. Orient the servo so that its output shaft is centered on the short end of the enclosure lid. Attach the single-ended horn to the shaft in the middle of its rotation range, pointing straight up, and screw the horn tightly onto the servo. Plug the servo connector into the female connector extending from the feather.





